知能ロボットコース
VIDEO
VIDEO
研究室紹介
あらゆる環境であらゆる動きを可能とする究極的な没入型VRシステムである「フルダイブ」の実現に当たっては、依然として解決すべき課題が山積しています。中村壮亮研究室では、フルダイブの実現を目指し、実環境や身体姿勢に依存しない没入型VRシステムとして、身体を機械固定した状態における「① 運動意図の取得、② 運動のシミュレーション、 ③ 運動感覚の提示」の要素技術から構成される「Motion-Less VR」の研究を進めています。各種センサで人間の運動意図を正確に予測し、運動結果に合致する感覚を各種デバイスで提示しています。身体固定状態で運動したかのような感覚を与えるためには、運動錯覚という特殊な錯覚技術を用いています。
VIDEO
VIDEO
SLAMにおける建築図面等の幾何情報の活用
SLAMとは、自動運転やロボットの自律移動で必須となる環境地図を自動構築する手法です。
VIDEO
VIDEO
WPT-Robot (Wireless Power Transfer-Robot)
通信の無線化に伴いLANケーブルが不要となったように、給電の無線化により電力ケーブルが一掃されれば生活様式が大きく変わります。しかし、人体に安全なものの中では最も給電範囲が広いとされる磁界共鳴式無線給電であっても、その技術単体では生活空間を広域でカバーできないことが問題でした。そこで、中村壮亮研究室では、自律移動ロボットに磁界共鳴式無線給電の機能を搭載したWPT-Robot (Wireless Power Transfer-Robot)により、その実現に取り組んでいます。1つ目の動画は、WPT-Robotが生活空間内に存在する電子機器の電力管理を行う様子を表しています。2つ目の動画は、国際ロボット展で展示したプロトタイプシステムになります。ここでは、モバイル機器に見立てたLEDキャンドルに永続的に給電しています。
VIDEO
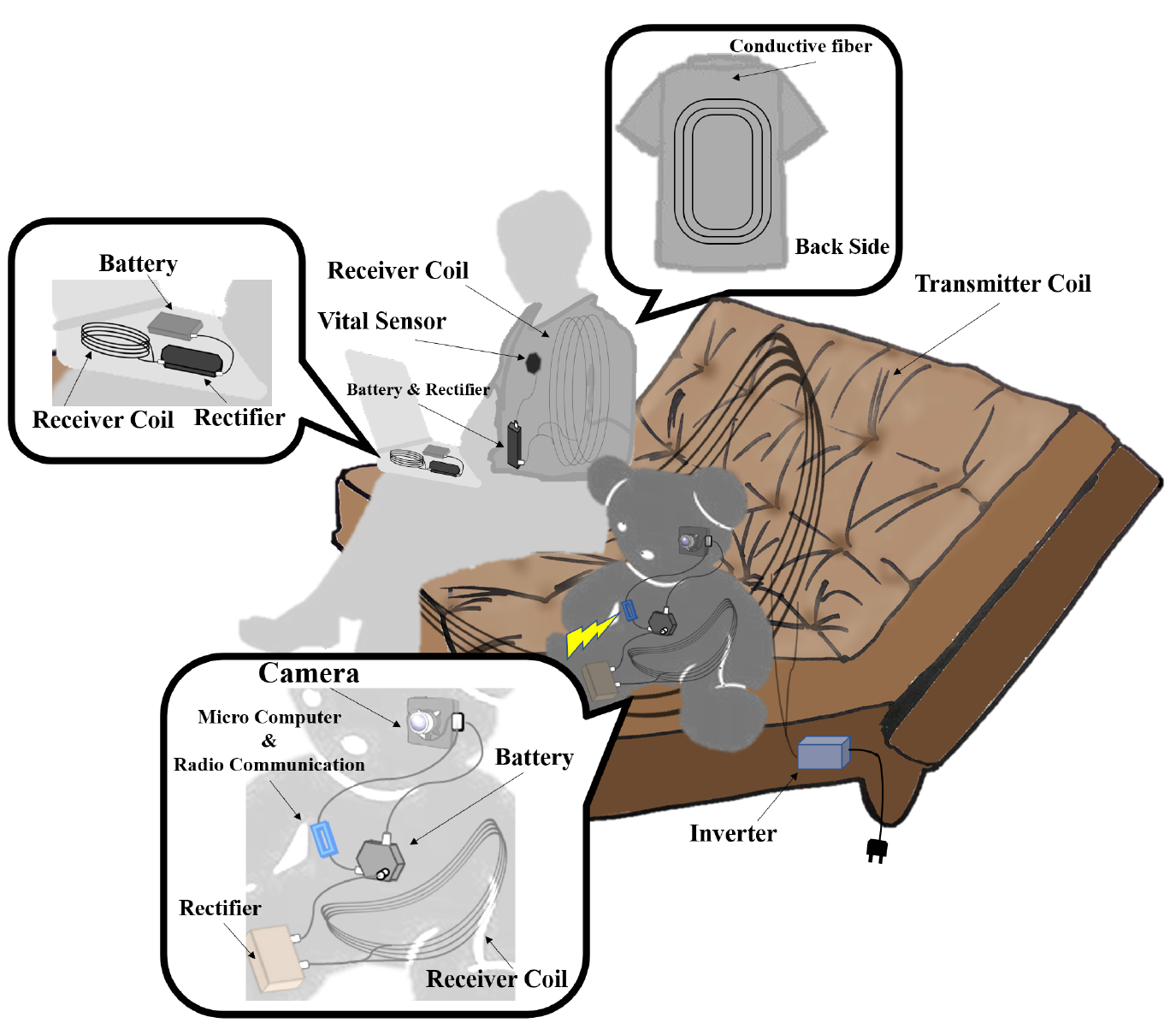
“柔らかいコイル”を用いた磁界共鳴式無線給電
スマートフォンやスマートウォッチの充電などで無線給電が徐々に普及していますが、給電パッド・給電対象ともに固いものしか許容されないことが普及における弊害の一つとなっています。これは、給電効率の低下を招かぬよう、従来の無線給電技術では固いコイルの使用が前提であったためです。しかし、生活空間には人間の体になじむような柔らかい物であふれています。そこで、中村壮亮研究室では、柔らかいコイルを用いた磁界共鳴式無線給電に取り組んでいます。これにより、柔らかい家具(ソファ、ベッド、椅子 etc.)への送電コイルの内臓による給電エリアの拡張や、柔らかい物体(人間が着用するもの全般、カーテン、ぬいぐるみ etc.)への受電コイルの内蔵による給電対象の拡大が可能となります。図は、本研究により実現される未来像になります。動画では、研究室で開発した特殊技術により、コイルを90度曲げた状態であっても給電効率が維持されていることを示しています。
VIDEO
遠隔行動誘導
遠隔行動誘導とは、AR/VR/DRなどの技術を用いて遠隔地から現場の人間に作業指示/支援を行う手法です。中村壮亮研究室では、遠隔行動誘導技術の各種応用に取り組んでいます。この動画は、押印作業にこの技術を応用した遠隔押印システムになります。このシステムでは、押印責任者が現場に居合わせなくとも現場作業者の手を借りる形で遠隔地から押印行動が出来るため、テレワーク実施の一助となることが期待されます。ここでは、機密情報を守るために作業者映像では書類情報にぼかしが入っている、押印箇所のCG図形(矢印など)によるAR提示や音声指示にも対応している、などユーザビリティ向上のための各種工夫も施しています。